Engineering Porfolio
Senior Design Capstone: Vulcan View


About
For my senior design capstone project, my team designed and built an augmented reality headset for firefighters to enhance their vision while on a search and rescue mission.
My role in this project involved augmented reality system development; selecting the hardware components to meet our sizing and computational requirements. I also integrated the openCV algorithms into the linux system allowing for line detection to be displayed, outlining your surroundings in dark or smoky environments, enhancing your precision and speed during a search and rescue mission. I also wrote the testing protocols for the hardware subsystem, resulting in a 50% time reduction in a search and rescue simulation with our team members.



Our project won the Purdue Engineering Student Council industry impact award for its realistic market capability and the impact that it would have on the firefighting industry

ME 475: Rotary Inverted Pendulum
Position Following
Error and Noise Correction
About
For ME 475 (Automatic Control Systems) our final project was to design a control system for a rotary inverted pendulum system, that could balance and keep a rod upright as well as correct error from outside stimulus and track input signals.
My partner Vishwesh Krishnamurthy and I derived dynamic equations to model the electrical and mechanical systems. We used system identification techniques such as least-squares estimation and a coulomb friction model to refine our model. We then designed both a two-loop cascaded controller and a state-space controller using pole placement and tested them based on steady-state tracking error and 2% settling time. After experimentation with different signal inputs, we met our performance specifications, placing 3rd place overall in the class.
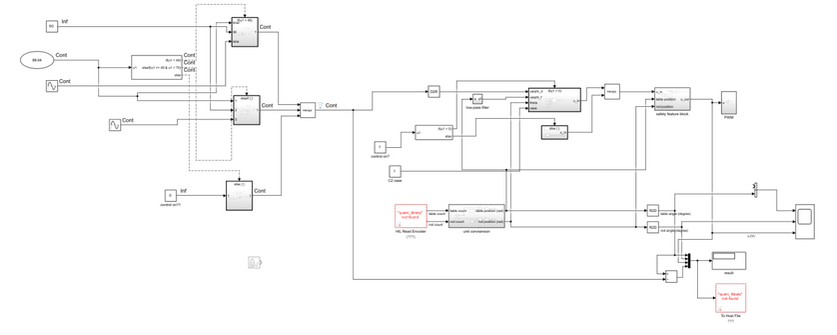
Final Simulink Model
PSP Active Controls: TADPOLE


TADPOLE Rendering
Combustion Chamber
Role
Controls and Hardware Engineer
About
Tadpole is the PSP Active Control team's additively manufactured, gimballing liquid rocket engine. PSP Active Controls partnered with an Additive manufacturing company called Elementum 3D to fully 3D print an aluminum alloy thrust chamber for the rocket motor. (see article on elementum3d.com)
Recent Involvement
My work on the project so far has been working on control algorithms to precisely change the flow of fuel/oxidizer, using automated, actuating throttling valves. After the successful development of TADPOLE is completed, we plan to implement it into the ASTRA flight vehicle, creating TOAD, a liquid rocket-propelled landing vehicle.
ME 375 (Control Systems II) Project
Line Tracking
Object Tracking
About
ME 375 (controls II) final project. Designed a control algorithm that allowed a robot to utilize infrared and ultrasonic sensors to follow a line on the ground as well as stay a measured distance away from an object in front of its ultrasonic sensor. I used Simulink to create a feedback control loop that employed state machine logic to react to environmental stimulus. The robot has two motor/encoders, one for each wheel, an Arduino microcontroller and motor driver, power source, a line of three infrared sensors facing the ground, and an ultrasonic sensor facing forward. See full report below.

Simulink Block Diagram
ME 30801 (Fluid Mechanics) Project
Wind Tunnel Testing
About
ME 30801 (Fluid Mechanics Lab) final project. My team wanted to see if the boilermaker Xtra special could generate enough lift to take off, given a specific airfoil at a 20-degree angle of attack. We tested this by designing and 3d printing a scale model of the boilermaker xtra special with detachable wings and tested it in a wind tunnel, attaching it to a dynamometer test stand that measured the lift and drag on the model through our tests. We found that it was not possible for the Boilermaker Xtra special to fly with the wing area and wind speed used in our testing. There is a possibility though, with enough speed and/or wing area, the train could take off! Full report below.

Model on Test Stand

Wind Tunnel
PSP Active Controls: ASTRA


Role
Hardware Engineer- Avionics
Recent Involvement
Implementing CAN Bus to the system to increase communication speed between the sensors/IMU to the microcontroller
Soldering wires to establish reliable connections to the servos that control the gimbal system
Troubleshooting multiplexer issues for the Wheatstone bridge system used for testing
Aircraft Design Project

Airplane Model
About
Final AAE 251 Project, introduction to aerospace design. Worked on a team of four to create a racing plane that is optimized to win a 5000-mile race. Created a sizing code finding the actual weight of the plane depending on different parameters/specs on the plane. Optimized the speed of the plane based on the amount of fuel stored and how many times that plane would refuel. Picked an airfoil design and wing size/orientation based on our requirements. Chose a piston motor and propeller design to meet our requirements. Find the full report below.
ME 354 (Machine Design) Project

Input Shaft Diagram
About
Final project for ME 354 (Machine Design). This was a project to design the shaft, gears, bearings, and housing for a transmission. I used many different equations and methods from Shigley's textbook, static and dynamic analysis, free body diagrams, failure and fatigue analysis to choose diameters, materials, gear design, and gearbox design for the different components in the gearbox. See full report/calculations.

Gear Diagram
ME 444- Computer-Aided Design and Prototyping (Toy Design)
Toy Car Design


Full CAD Model- without protective shell
Final Prototype


Full CAD Model with shell
Ackermann Steering Linkage

Rear powertrain
Role
Fully designed and 3D printed the chassis, steering linkage, axle connections, and car shell
Employed an Ackermann steering linkage allowing for rear-wheel drive and simple control for the driver
Used Arduino programming and the Blynk app to connect to the Arduino and motor driver to control the car from a personal cellphone
Our car won first place in a race against all of the other cars in the class!
ME 263- Sophomore Design Project
Everyday Engineering Efficiency- Carbrella


Full Assembly
Exploded Model

Demonstration
Product
The purpose of this project was to create a product that will help people. Our team created an umbrella that hooks onto your car door and opens up with the door. This product is for mothers who have to buckle up their children in the car while it's raining, shielding their backs from the rain and keeping them dry.
Role
Led design and ideation for the project
Employed prototyping and manufacturing, using tools such as 3D printing and machining to create the product
Used a cost-benefit analysis to create the most profitable product
Biomimetic Robotic Fish Ballast- University of Houston

Original Design


Demonstration
Final Prototype
Purpose
The biomimetic robotic fish was created to swim inside narrow tunnels and pipes in the oil and gas industry, scanning for possible leaks or damage from the inside. This project saved the customer money as manual inspection of the pipelines is tedious and expensive.
Role
My role in this project was to improve the design of the device that allowed for three-dimensional movement underwater for a robotic fish
The original fish used a hydrolysis device that was too slow and hard to control- improved using a syringe connected to a rack and pinion system that increased/decreased the volume of the fish, allowing for quick response depth control
Employed closed-loop PID control using Simulink to control the fish remotely

Alternative Design
Rube Goldberg Machine- Purdue ASME

Role: Project Director
led a team of 20+ members, oversaw and coordinated the entire project
Scheduled weekly meetings as well as deliverables to keep the team on track
Brought the team to the Purdue National Chain Reaction Competition for the first time since 2018